Description
DJI ZENMUSE L2
High-Precision Aerial LiDAR System
Powerful Range, Elevated Precision
Zenmuse L2 integrates frame LiDAR, a self-developed high-accuracy IMU system, and a 4/3 CMOS RGB mapping camera, providing DJI flight platforms with more precise, efficient, and reliable geospatial data acquisition. When used with DJI Terra, it delivers a turnkey solution for 3D data collection and high-accuracy post-processing.

High Precision
Vertical Accuracy: 4 cm;
Horizontal Accuracy: 5 cm [1]
Exceptional Efficiency
2.5 km2 covered in a single flight [2]
Superior Penetration
Smaller laser spots, denser point clouds
Detection Range [3]
250m @10% reflectivity, 100klx
450m @50% reflectivity, 0klx
5 Returns
Turnkey Solution [4]
Point Cloud LiveView
One-Click Processing on DJI Terra
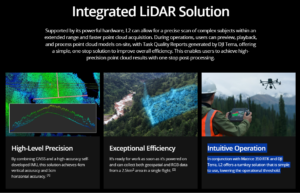
Integrated LiDAR Solution
Supported by its powerful hardware, L2 can allow for a precise scan of complex subjects within an extended range and faster point cloud acquisition. During operations, users can preview, playback, and process point cloud models on-site, with Task Quality Reports generated by DJI Terra, offering a simple, one-stop solution to improve overall efficiency. This enables users to achieve high-precision point cloud results with one-stop post-processing.
- High-Level Precision. By combining GNSS and a high-accuracy self-developed IMU, this solution achieves 4cm vertical accuracy and 5cm horizontal accuracy. [1]
- Exceptional Efficiency. It’s ready for work as soon as it’s powered on and can collect both geospatial and RGB data from a 2.5km2 area in a single flight. [2]
- Intuitive Operation. In conjunction with Matrice 350 RTK and DJI Terra, L2 offers a turnkey solution that is simple to use, lowering the operational threshold.
Frame-Based LiDAR

- 30% Detection Range Increase [5]. L2 can detect from 250 meters at 10% reflectivity and 100 klx, [3] and up to 450 meters at 50% reflectivity and 0 klx. [3] The typical operational altitude now extends up to 120 meters, notably enhancing operational safety and efficiency.
- Smaller Laser Spots, Denser Point Clouds. With a reduced spot size of 4×12 cm @100m, only a fifth of that of L1, L2 not only detects smaller objects with more details, but can also penetrate denser vegetation, generating more accurate digital elevation models (DEM).
- Supports 5 Returns. In densely vegetated areas, L2 can capture more ground points beneath the foliage.
- Effective Point Cloud Rate: 240,000 pts/s. In both single and multiple return modes, L2 can reach a max point cloud emission rate of 240,000 points per second, allowing the acquisition of more point cloud data in a given time frame.
- Two Scanning Modes. L2 supports two scanning modes, offering flexibility for users based on their task demands. In repetitive scanning mode, L2’s LiDAR can achieve more uniform and accurate point clouds while meeting high-precision mapping requirements. In non-repetitive scanning mode, it offers deeper penetration for more structural information, making it suitable for power line inspection, forestry surveying, and other scenarios.
- Frame-based Design. The frame-based design results in an effective point cloud data rate of up to 100%. Together with a three-axis gimbal, it brings more possibilities to surveying scenarios.
High-Accuracy IMU System
- Improved Accuracy. The high-accuracy self-developed IMU system, combined with the drone’s RTK positioning system for data fusion during post-processing, gives L2 access to highly accurate absolute position, speed, and attitude information. In addition, the IMU system’s enhanced environmental adaptability improves the operational reliability and precision of L2.
Yaw Accuracy [6]
Real-time: 0.2°, post-processing: 0.05°
Pitch/Roll Accuracy [6]
Real-time 0.05°, post-processing 0.025°
- No IMU Warm-up. The performance of the IMU system has been significantly enhanced, and it is ready for use the moment it’s powered on. And, the accompanying drone is ready to begin tasks immediately once the RTK is in FIX status, delivering an optimized in-the-field experience.
RGB Mapping Camera
- 4/3 CMOS, Mechanical Shutter. Pixel size has been enlarged to 3.3 μm, and effective pixels now reach 20 MP, resulting in a significant improvement in overall imaging, as well as more enriched true-color point cloud details. The minimum photo interval has been reduced to 0.7 seconds. The mapping camera has a shutter count of up to 200,000 times, further reducing operational costs. When point cloud collection is not needed, the RGB camera can still take photos and videos, or collect images for visible light mapping.
Application Scenarios
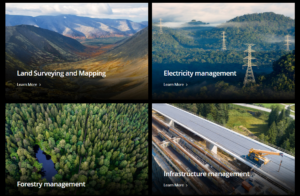
In coordination with DJI Enterprise flight platforms and DJI Terra, Zenmuse L2 can be applied to land surveying and mapping, electricity, forestry, and infrastructure management, as well as other scenarios.
- Land Surveying and Mapping
- Electricity Management
- Forestry Management
- Infrastructure Management