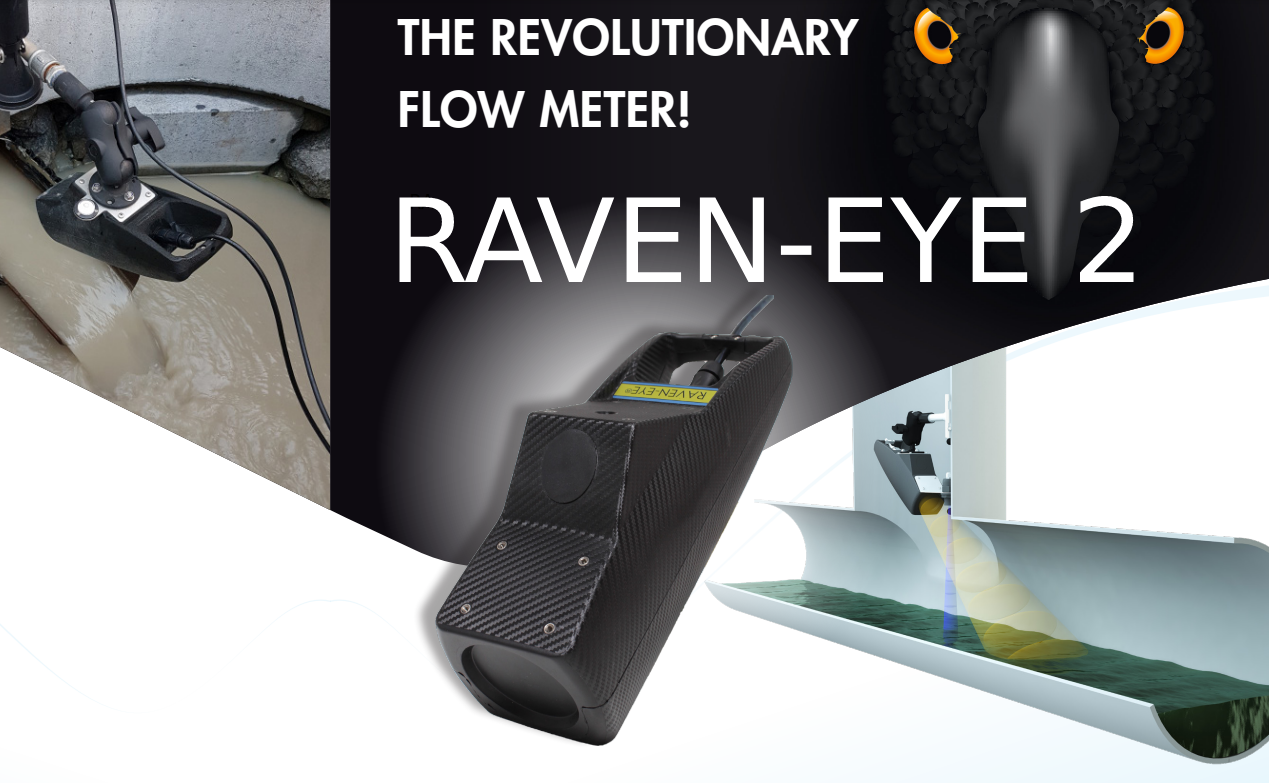
The RAVEN-EYE® is mounted above the water surface and measures the flow velocity at the water surface using a pulse wave radar and the flow depth with a level sensor (ultrasonic, radar or pressure). The flow rate is calculated applying the continuity equation:
Q = v . A
During each measurement cycle, the RAVEN-EYE® makes thousands of individual velocity measurements which are analyzed and processed into an extremely accurate average velocity measurement reading using a dedicated digital signal processor making realtime spectral analysis. Average velocity is calculated within the sensor by analyzing the surface velocity distribution and using a self-learning technology that doesn’t require theoretical modules nor site calibration.
Technical Specifications:
- Size (HxWxL): 7.2“ x 5.5“ x 16.6“
- Weight 6.61 lb (without cable, level sensor and mounting accessories)
- Materials Enclosure: Polyurethane (PU), stainless steel
- Cable: Polyurethane jacketed
- Cable Lengths: 3, 66, 99 or length as needed up to 984 ft
- Protection: IP68/NEMA 6P
- Certifications: CE, ATEX (option)
- Temperature Range Operating: -22 to 158 °F
- Storage: -22 to 176 °F
- Power Required Input voltage: 4 to 26 VDC
- Outputs: 1 passive analog 4-20 mA (velocity only)
- Communication: RS-485 (serial MODBUS ASCII open protocol) for use with PLCs RS-485 (proprietary protocol) for use with IFQ series or RTQ-Logger series
- Field interchangeable: Automatic recognition between stationary or portable units
- Flow Accuracy: ±5% of reading (typical : assumes pipe is 0 to 90% full)
- Flow Measurement Method
- Conversion from surface velocity to average velocity by analyzing surface velocity distribution using a self-learning technology that doesn’t require theoretical modules nor site calibration.
- Conversion of water level and pipe size to fluid area.
- Multiplication of fluid area by average velocity to obtain the flow rate.
- Velocity Measurement Method:
- Non-Contact Radar Doppler
- Measurement Range: ±0.26 ft/s to ±29.53 ft/s
- Measurement: Bi-directional
- Accuracy: ±0.5% of reading ±zero stability
- Zero Stability: ±0.06 ft/s
- Minimum Velocity: 0.26 ft/s (depending on flow conditions)
- Optional: Combined Level Measurement (Ultrasonic):
- Technology: Non-Contact Ultrasonic Pulsed Echo
- Measurement Range: 0.00 to 5.74 ft (with ULS-02), 0.00 to 18.86 ft (with ULS-06)
- Accuracy: ±0.2% of reading (with ULS-02), ±0.3% of reading (with ULS-06) Includes non-linearity + hysteresis
- Temp. Error Max. 0.04 %/K
- Resolution: 0.003 ft
- Optional: Combined Level Measurement (Radar):
- Method: Non-Contact Pulsed Radar
- Range: 0.00 to 49.2 ft
- Accuracy: ±0.006 ft of reading
- Resolution: 0.003 ft
- Optional Separate Level Measurement Method
- Any 4-20 mA loop powered sensor